Projects
Below are some lines of research that I work on:
Task and Motion Planning
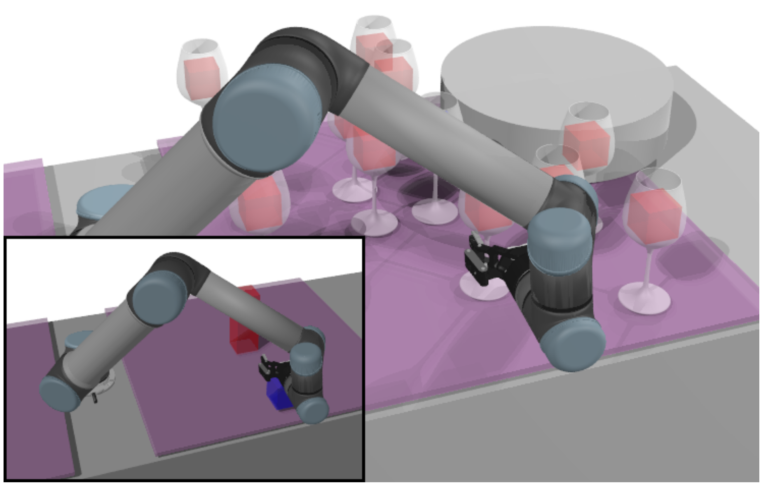
Testing and Training Scenarios for Learning Task and Motion Planning Heuristics In Task and Motion Planning (TMP or TAMP) a robot is given some discrete high-level goal to accomplish. The robot must find a sequence of actions that achieves this goal and the corresponding motion plans for each action
Synthesis for Robotics
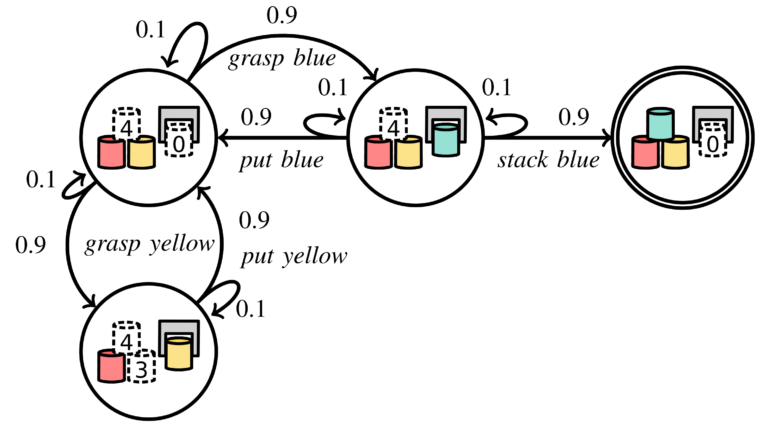
Part of an MDP Used to Model Robotic Manipulation Domains in Probabilistic Synthesis In synthesis, the robot is given some task specification and some abstraction of it’s domain, including a model of potential interference (either by another robot, a human, or “nature”). The robot must then synthesize a correct-by-construction policy to guarantee / maximize the probability of task completion under this model
Discrete Guides for Motion Planning
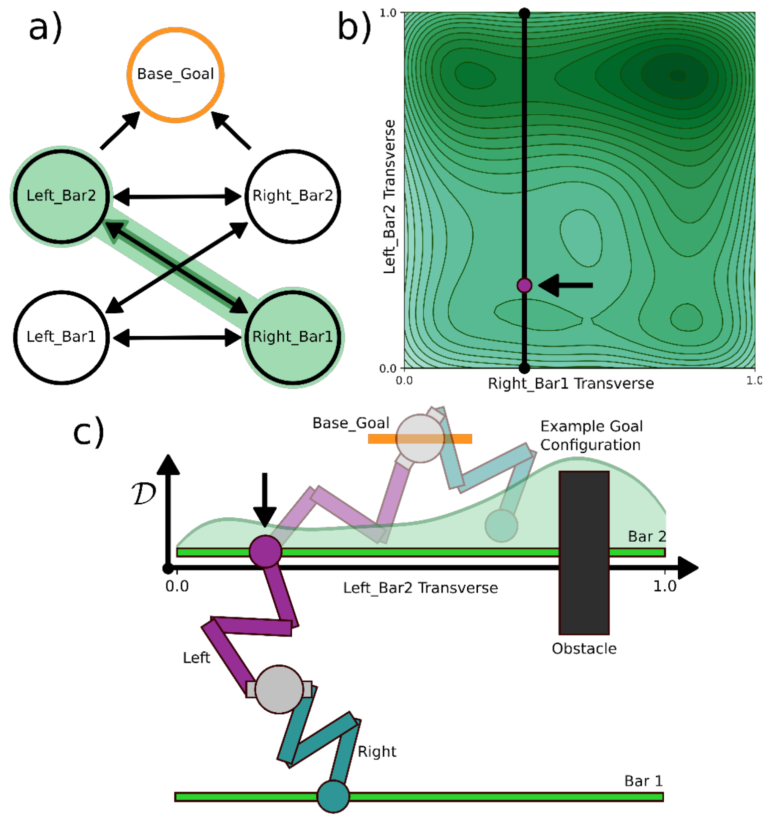
Multi-modal planners can use adaptive discrete guides to make their search more efficient In motion planning, many problems can be solved more efficiently by using a discrete search over some simpler structure (e.g., a workspace decomposition or a mode-graph) to guide the search for a motion plan
The above projects only contain some of my papers. For a full list, please see publications.